
- Introducción
- Sistema de bombeo de agua potable para dos barriadas de la Capital
- Lógica de control
- figura de líneas
- Circuitos lógicos eléctricos
- La memoria
- Simbología
- Descripción del diagrama de fuerza
- Notas de electricidad
- Arrancadores de estado sólido
- Catálogo técnico
- Motor vertical Siemens y módulos de protección de estado sólido para motores
- Dispositivos de protección de estado sólido para motores
- Bomba de mucosidad axial Siemens
- Accesorios
- Fusible de acción rápida
- Tableros de control
- Lógica del PLC (Regulador Lógico Programable)
- Programación empleando la interfaz del driver
- Programación guiada del panel de control
- Programación a través de interfaz por PC
- Cotización de los artículos
- Conclusiones
- Bibliografía
Introducción
Las necesidades de automatización industrial tienen por respuesta equipos cada vez más versátiles. Estos equipos, en algunos casos, al mismo tiempo que dan la solución buscada, traen consigo problemas que también hay que solucionar. Un claro ejemplo de esto es en general los equipos de Electrónica de Potencia. En particular el crecimiento explosivo que están teniendo los armónicos en los Sistemas Eléctricos de Potencia son en gran medida por su causa. El ejemplo que motiva este trabajo es un claro exponente de este problema. Nuestro proyecto consiste en diseñar un sistema de bombeo con arrancadores de estado sólido, para dos barriadas, con la ayuda de cinco (5) bombas.
El término "arrancador de estado sólido" puede sonar un poco confuso, es por ello que, queremos empezar diciendo que ellos son utilizados cuando se requiere un arranque suave y lento. En lugar de operarlos directamente a plena tensión, se arrancan con aumentos graduales de voltaje. Los arrancadores de estado sólido evitan disturbios de la red eléctrica y picos de corriente así como esfuerzos mecánicos que causan desgaste en el motor y la máquina que se acciona (la bomba).
Es bien conocido que antes de determinar el tamaño de un sistema de bombeo de agua, es necesario conocer los valores de los conceptos básicos que describen las condiciones hidráulicas de una obra. El tamaño del sistema, que tiene una relación directa con el producto de la Carga Dinámica Total (CDT) y el volumen diario necesario, entre otras cosas. El estudio que realizamos busca darle otra perspectiva a un proyecto de esta magnitud, ya que, estaremos trabajando desde el punto de vista de un Ingeniero Eléctrico. (figuras de potencia, figuras de control etc.).
Con este informe buscamos mostrar de la manera más sencilla pero efectiva todos los pasos necesarios para realizar el estudio y posible aprobación de nuestro proyecto. Gracias a la ayuda de conceptos aprendidos en clase y de otros obtenidos de la investigación presentamos nuestros resultados.
Sistema de bombeo de agua potable para dos barriadas de la Capital
BARRIADA #1
Gracias a las bomba # 1 (B1) y a la bomba # 2 (B2) bombearemos agua potable por un sistema de tuberías, hacia esta barriada. En tanques especiales de stock tendremos controladores de nivel que serán los encargados de mandar las señales a sus respectivas bombas, en pocas palbahías, los sensores del tanque #1 controlaran la bomba #1, como los del tanque #2 a la bomba #2.
?? Sensor de Nivel Inferior. Manda la señal de encendido a los drivers (arrancadores de estado sólido) de las bombas si el nivel del agua en los tanques llegara a disminuir.
?? Sensor de Nivel Superior. Manda la señal de apagado a los drivers (arrancadores de estado sólido) de las bombas si el nivel del agua en los tanques llegara a aumentar hasta los límites recomendados por seguridad.
Servo-válvulas 1 y 2 (SV1 y SV2) serán las encargadas de obstruir el paso del agua a los tanques de stock cuando estos estén a su máximo nivel.
Este sistema posee una gran flexibilidad ya que estaríamos manteniendo dos tanques de stock para esta única barriada. En caso de falla, mantenimiento, etc., de alguna bomba, esta barriada no perderá completamente el valioso fluido, ya que, la otra bomba se encargaría de mantener los niveles necesarios en los tanques.
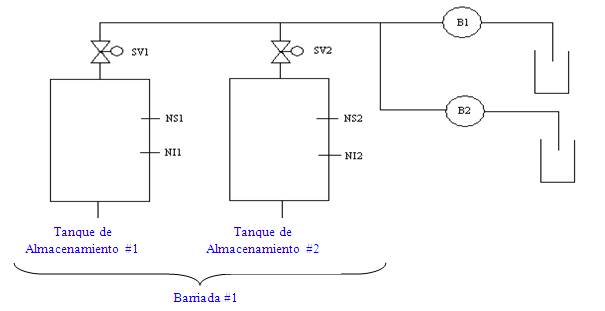
FIGURA 1- figura de nuestro proyecto para la barriada #1.
BARRIADA #2
El arreglo para esta barriada es muy similar a la de la anterior. En este caso debemos abastecer un lugar más grande, por ende, en este caso contaremos con tres (3) bombas B3, B4
B5. También bombearemos agua potable por un sistema de tuberías. En tanques especiales de stock tendremos controladores de nivel que serán los encargados de mandar las señales a sus respectivas bombas, en pocas palbahías, los sensores del tanque #3 controlaran la bomba #3 y así sucesivamente.
?? Sensor de Nivel Inferior. Mandar la señal de encendido a los drivers (arrancadores de estado sólido) de las bombas si el nivel del agua en los tanques llegara a disminuir.
?? Sensor de Nivel Superior. Mandar la señal de apagado a los drivers (arrancadores de estado sólido) de las bombas si el nivel del agua en los tanques llegara a aumentar hasta los límites recomendados por seguridad.
Este sistema posee una gran flexibilidad ya que estaríamos manteniendo dos tanques de stock para esta única barriada. En caso de falla, mantenimiento, etc., de alguna bomba, esta barriada no perderá completamente el valioso fluido, ya que, las otras bombas se encargarían de mantener los niveles necesarios en los tanques.
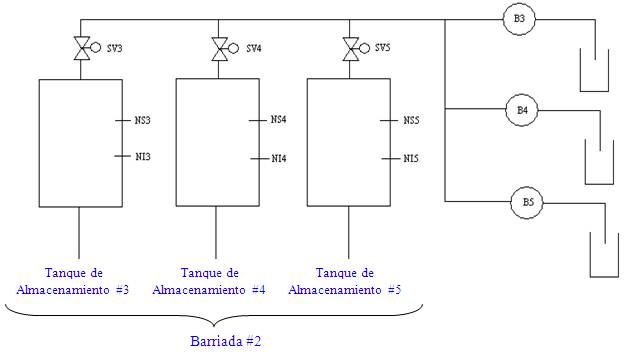
FIGURA 2- figura de nuestro proyecto para la barriada #2.
CONTROLADOR DE NIVEL DE AGUA
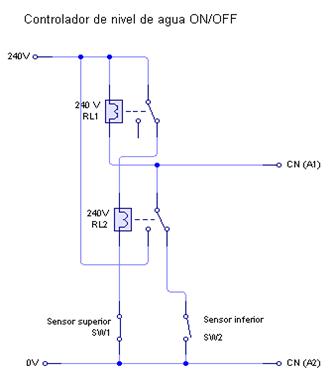
FIGURA 3- Controlador del nivel del agua ON/OFF.
La figura muestra el controlador de nivel de agua donde SW representa las bollas de control de nivel. Donde una es dependiente de la otra después de su iteración estas activan los niveles para los terminales de salida "CN" donde estas serán dirigidas hacia las bobinas del contactor o directamente a otro subsistema del sistema de control. De este modo controlando el nivel del agua en el reservorios para la vida útil del equipo donde este controlador se le agrega uno a cada. Reservorio dependiente de que lugar vaya lugar X o lugar Y.
Lógica de control
En el documento presentado se procede al control de de cinco bombas de 250Hp en 480 voltios para controlar el caudal hacia una barriada #1 y #2. El caudal enviado hacia la barriada #1se realiza por tres bombas de 250 Hp 480 V y hacia la barriada #2 se realiza por 2 bombas de 250Hp 480V (ver Figura 5). En la realización de este control se hace con arrancadores de estado sólido para controlar así su par de arranque y evitar los factores de demanda altos, los arrancadores de estado sólidos o arrancadores suaves son controlados por un PLC cuya programación viene de fábrica y solo se les cambian los valores predeterminados, se utilizan arrancadores de la marca ABB modelo ACS550-02-486A-4 uno para cada bomba (ver Figura 6), también podría ser una configuración en paralelo de dos o más motores pero en este caso es un arrancador para cada bomba.
La configuración de conexión de los arrancadores en el panel de control es una conexión manual y una automática por alguna eventualidad al momento del funcionamiento de las bombas. En el panel de control se indica con luces de color rojo y verde si esta encendido o apagado el sistema de bombeo de cada lugar ("1" y "2"). Al momento de la configuración del sistema se había planteado una conexión maestro esclavo pero por economía y agilidad se estableció la conexión en paralelo en el mando de control, ahora bien en las protecciones de sobrecarga y falla se utilizan accesorios de protección antes y después del driver donde las que están antes del driver en dirección del bus a las bombas son para proteger al driver de cualquiera eventualidad eléctrica y las que se localizan entre el driver y las bombas son para la seguridad de los motores de las bombas. Las necesarias para proteger el driver son interruptores magnéticos y fusibles de protección uno para cada hilo y para las bombas se coloca las interruptores térmicos e interruptores magnéticos, los otros módulos de protección son dados por la lógica de programación en el driver o arrancador de estado sólido como por ejemplo protección de sobrecarga, sobre o bajo voltaje interrupción de fase si pasa este caso el driver de control indicara una alarma, o indica alguna falla indicándolo en su pantalla LCD cual es la falla, si es voltaje o corriente y la hora de la eventualidad.
En el panel de control se posee de un solo interruptor de encendido y uno de apagado contando también con el apagado de emergencia, en modo manual se puede sacar del sistema de bombeo cualquiera bomba para su reparación o revisión, el sistema de control esta ejecutándose con voltaje de 24 voltios y 10 voltios en algunos casos para estos de utilizan relevadores de múltiples vías con bobinas de 120V para poder controlar las entradas del PLC del driver que trabajan a niveles de voltaje DC en 24 y 10 voltios.
Otra de las ventajas de utilizar los arrendadores de estado sólidos programados es la eficiencia de estos donde se protege las bombas de los trabajos en vacío y de la cavitación en las bombas.

FIGURA 4- Ejemplo de la tubería de impulsión en la Estación de Bombeo


FIGURA 5- Ejemplos del bombeo hacia lugares "X" y "Y"

FIGURA 6- Ejemplo de la instalación de los sistemas de estado sólido.
Los interruptores de encendido apagado controlan unos relevadores los cuales a su ves activan o desactivan las entradas y salidas de los PLC para controlar los motores una otra de las ventajas de los módulos electrónicos es que se reduce en espacio de trabajo (ver Figura 6).
?? Datos técnicos del control.
?? Arrancado con bajo par de arranque para disminuir factor de demanda.
?? Protección del equipo de bombeo.
?? Sacar cualquiera bomba de sistema para revisión.
?? Proteger las bombas de trabajo forzado en vacío.
?? Bombas trabajando siempre a par y velocidad nominal.
figura de líneas
El medio de comunicación elemental para el lenguaje de control es a través del uso de los diagramas de línea.

FIGURA 7- figura de líneas de un circuito eléctrico.
El diagrama de línea consiste de una serie de símbolos interconectados por líneas para indicar el mucosidad de corriente de control a través de los diversos módulos. El diagrama de línea representa rápidamente una serie de relaciones de variables de control que pueden tomar muchas palbahías para explicarse.
El diagrama de línea de la Figura 7 nos muestra: la fuente de energía representada con líneas gruesas y el mucosidad de corriente a través de los diferentes elementos del circuito tales como botoneras, contactos, bobinas y protecciones de sobrecarga. Todo esto se le representa con líneas delgadas en el diagrama.
El diagrama de líneas tiene como propósito mostrar sólo la secuencia de control de los módulos que es necesaria para la operación básica del sistema controlador. Su propósito no es mostrar la relación física de los diversos módulos en el sistema controlador. Más bien, este tipo de diagrama se inclina hacia la simplicidad, enfatizando sólo la operación del circuito de control.
Circuitos lógicos eléctricos
La aplicación que se encuentra con mayor frecuencia de los circuitos de control lógico es aquella en la que se emplean contactos eléctricos, los cuales pueden accionarse de distintas maneras, tales como: sensores de todo tipo, accionadores manuales o relevadores magnéticos.
RELEVADORES
Los relevadores son módulos que se emplean en los circuitos de control, los cuales utilizan un campo electromagnético para cerrar y/o abrir contactos. Este campo electromagnético se genera por medio de un electroimán, que convierte energía eléctrica en energía mecánica. La figura representa un electroimán en el cual se distinguen sus principales elementos como son:
?? La bobina: produce el mucosidad magnético cuando circula por ella una corriente eléctrica.
?? El núcleo: metódicamente hecho de acero laminado de alta permeabilidad que proporciona trayectoria para el campo magnético de la bobina
?? La armadura: es atraída hacia el núcleo por la acción del campo magnético.
FIGURA 8- Electroimán (módulo electromagnético).
FIGURA 9- Relevador básico (módulo electromagnético).
En la Figura 9 se representa un relevador básico con sus componentes. Se puede notar que este relevador es prácticamente un electroimán que abre y cierra contactos aprovechando el desplazamiento de la armadura.
Existen básicamente dos tipos de contactos, estos son:
?? Contacto metódicamente cerrado (NC)
?? Contacto metódicamente abierto (NA)
El término "metódicamente" se refiere a la ubicación del contacto cuando la bobina está desenergizada. Cuando hablamos de un contacto metódicamente abierto estamos expresando el hecho de que no hay conducción a través del mismo cuando el relevador no recibe energía y si nos referimos a un contacto metódicamente cerrado se está expresando que los contactos conducen cuando el relevador no recibe energía.
FIGURA 10- Tipos de contactos eléctricos. a) Normalmente Abierto, b) Normalmente Cerrado.
En cuanto a sus aplicaciones, los relevadores se clasifican en dos tipos: los de control y los de potencia. Estos últimos también se les conoce como contactores. Los relevadores de control se emplean en circuitos pilotos, arrancadores magnéticos, circuitos de control de diferentes relevadores, contactores u otros módulos. Sus requerimientos de corriente y voltaje de conmutación son bajos y debido a esto sus contactos pueden ser pequeños y tener poca separación entre sí. Los contactores, en cambio, se utilizan para establecer e interrumpir repetidamente un circuito de potencia eléctrica. Los contactos de este módulo son diseñados para trabajo pesado en la interrupción de cargas industriales, las cuales requieren niveles de corriente relativamente altos.
La memoria
Muchos de los procesos industriales requieren que sus circuitos de control no sólo tomen decisiones lógicas, tales como AND, OR o NOT, sino que también deben ser capaces de almacenar, memorizar o retener las señales de entrada para mantener la carga energizada, aun después que las señales hayan desaparecido.
Un interruptor, en su casa, que controla una luz desde un solo punto es un ejemplo de un circuito con memoria. Cuando estás encendida la luz, permanece así hasta que alguien la apague y se mantiene apagada hasta que vuelvan a encenderla. Este interruptor realiza la función de memoria porque la salida corresponde a la última información de entrada hasta que se reciba nueva información que lo haga cambiar de estado. En el caso del interruptor de corriente eléctrica, el circuito de la memoria se llevó a cabo mecánicamente en el interior del interruptor.
LÓGICA DE CONTROL
FIGURA 11- figura de Escalera
La Figura 11 nos muestra el diagrama de subidas de nuestro proyecto. El mismo consta de:
?? (3) Interrumptores de Nivel
?? (2) Indicadores (focos)
?? (4) Botoneras Universales:
incluye los de on y off
?? (4) Relevadores Industriales
Multi-contactos
LÓGICA DE CONTROL SECUENCIAL
A continuación mostramos la
Lógica de Control General de nuestro proyecto.
Correspondería a la Barriada #2.
Este modelo es bastante similar para ambas barriadas. La diferencia esta, en que la barriada #2 utilizaría solo dos bombas.
El diagrama presentado (Figura12), es una red que permite:
?? El arranque de 3 bombas en paralelo.
?? Desactivar independientemente cualquiera de las mismas para propósitos de mantenimiento, reparación, cambios.
Una vez se energiza la red se enciende la luz roja indicando que los motores están fuera de servicio.
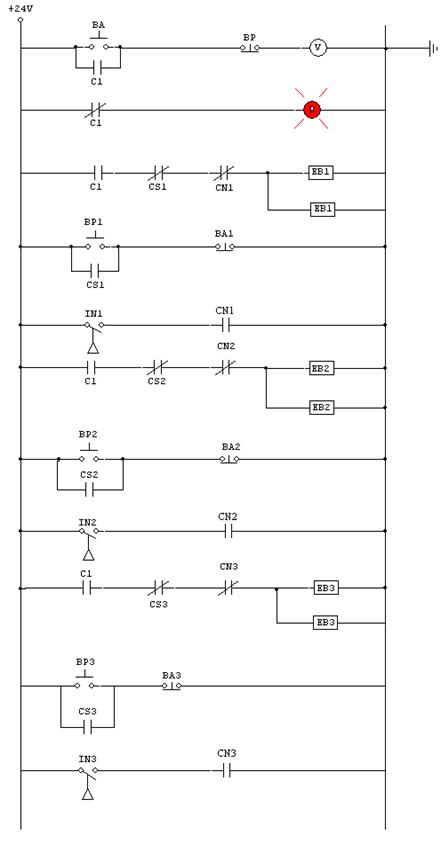
FIGURA 12- figura de subida secuencial #1. Modelo utilizado en la Barriada #2.
Al presionar BA (Figura13), se cierran los contactos C1 metódicamente abiertos y se abren los C1 metódicamente cerrados apagándose la luz roja y encendiéndose la luz verde indicando que los motores entran en operación.
Al dejar de presionar BA no pasa nada por el enclavamiento del C1 (NO), esto se hace por motivos de seguridad.
Al cerrar los C1 metódicamente abiertos se envían señales de activación a través de los contactos CS1, CS2, CS3 metódicamente cerrados a las entradas EB1, EB2, EB3 del convertidor de modo que las bombas se ponen en marcha.
Los pulsadores BP1, BP2, BP3 sirven para poner fuera de operación a las bombas B1, B2, B3 respectivamente.
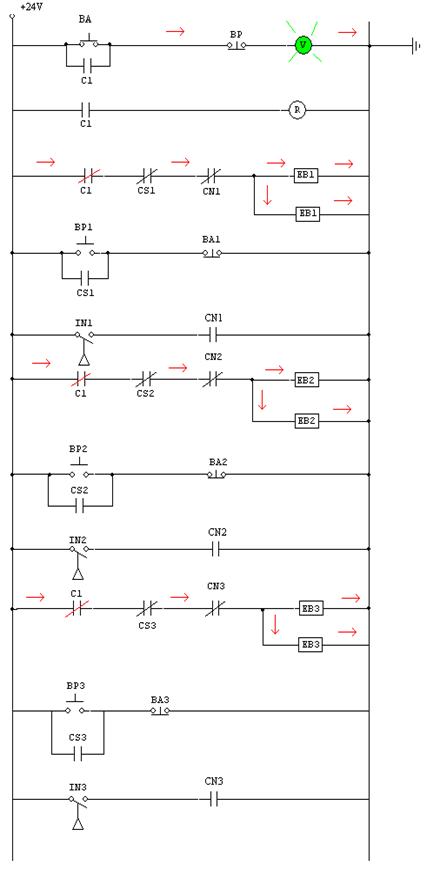
FIGURA 13- figura de subida secuencial #2. Modelo utilizado en la Barriada #2.
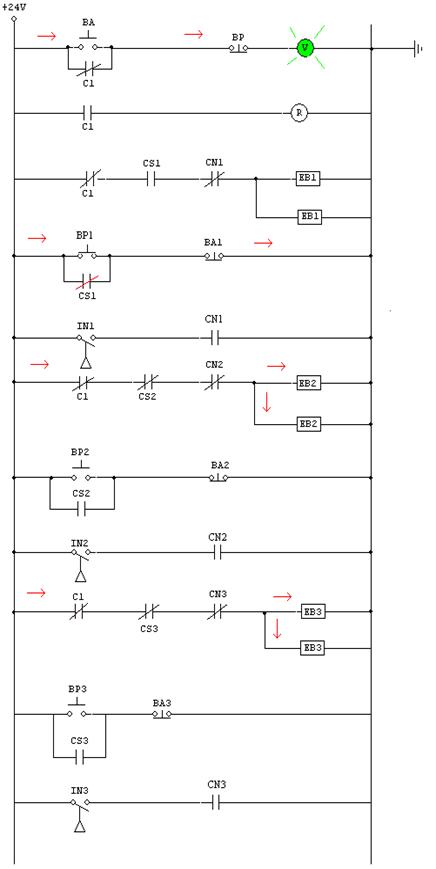
FIGURA 14- figura de subida secuencial #3. Modelo utilizado en la Barriada #2.
Por ejemplo, al presionar BP1 (Figura 14), se abre el contacto CS1 metódicamente cerrado en serie con las entradas EB1 desactivando las bombas y se cierra el contacto CS1 (NO) produciéndose el enclavamiento.
Al dejar de presionar o presionar nuevamente BP1 no pasa nada debido al enclavamiento, lo que sirve de protección mientras se trabaja sobre la bomba.
Para eliminar el enclavamiento se debe presionar el BA1( se abre CS1 NO) lo que a su ves pone en marcha la bomba ya revisada e instalada, cerrando el contactos CS1 metódicamente cerrado.
El sistema de control cuenta con un censor de nivel el cual monitorea el nivel de agua en el tanque de stock. Dicho censor cuenta con 3 captadores en el interior del tanque, dispuestos a diferentes profundidades.
NIVEL 1 TANQUE VACIO NIVEL 2 TANQUE A LA MITAD NIVEL 3 TANQUE LLENO
Al censar NIVEL 1
(Figura 15), N1 metódicamente abierto se cierra lo que provoca que el CN1 metódicamente cerrado en serie con las entradas EB1 se bahía; la bomba 1 deja de operar.
Al censar NIVEL 2, N2 se cierra, se abre CN2 metódicamente cerrado; la bomba 2 deja de operar.
Al censar NIVEL 3, N3 se cierra, se abre CN3 metódicamente cerrado y la bomba 3 deja de funcionar.
Por otra parte en cualquier instante, al presionar BP deja de fluir corriente, se pierde el enclavamiento y se abren los contactos metódicamente abiertos C1 desactivando todas las bombas, la luz roja se enciende nuevamente. Esta acción es en caso de emergencia.
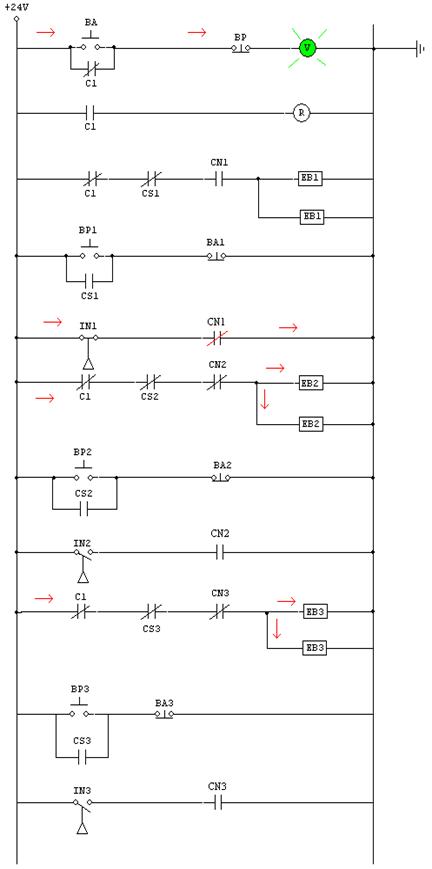
FIGURA 15- figura de subida secuencial #4.
Simbología

Descripción del diagrama de fuerza
El diagrama de fuerza que describe nuestro proyecto, es un esquema unifilar que empieza con la acometida desde el sistema de distribución eléctrico, pasa por un interruptor de potencia con capacidad de 60A tipo K luego llega a un transformador de conexión Y- Yaterrizada de 15kVA que reduce de 13.2kV a 480/277V, el cuál es nuestro voltaje de operación en la parte de potencia; seguido por otro interruptor de 60A tipo K, luego pasamos a un CT
75:5 y un PT 70:1 los cuales son transformadores para mediciones de corriente y voltaje respectivamente en este punto el sistema se aterriza mediante una malla de tierra que consta de 3 barras de Cooperweld de 5/8 x 10", 4/0 AWG, luego de esto llegamos con 15 conductores – 1/c 500MCM, al Breaker principal cuya capacidad es de 1600A, 480V 3P. Del Breaker salimos de nuevo con 15 conductores – 1/c 500 MCM hasta la bifurcación en la cual la alimentación se divide en dirección de cada una de las estaciones de bombeo de cada barriada; del lado de la estación de bombeo # 1 salimos con 12 conductores – 1/c 500MCM, hasta otro Breaker de 1200A, 480V, 3P. A partir de este punto se utilizarán 1 conductor – 1/c y un 3/0 DSN sin neutral ya que se trata de un sistema delta trifásico, el sistema deja de ser aéreo y viajará por 4 tuberías de 4"a cada uno de los motores y al panel de control. En cada una de las tres ramas de las bombas tenemos, alimentación a través de 1 conductor, 1/c y un 4/0 DSN, un Breaker de 350A, 480V, 3P, seguido por el arrancador de 300Hp, 480V, 60Hz y fp=0.98 (-) correspondiente a cada motor; tenemos motores de 250Hp, 480V, 302A, 60Hz, 3P y 3600rpm acoplado a una bomba especificada antecedentemente, además tenemos bancos de capacitores para compensación del factor de potencia cada uno de 480V y 150kVAR unidos a la rama a través de un Breaker de 200A, 480V, 3P.
En cuanto al panel de control está unido al sistema a través de un transformador de 3kVA 480:120/240 V, 1P. En lo que se refiere a la parte de la estación de bombeo #2, luego de la bifurcación tenemos para esta parte 9 conductores – 1/c 500 MCM hasta un Breaker de 800A, 480V, 3P; luego de esto como sucedió con la barriada #1, el sistema deja de ser aéreo y los conductores 1 – 1/c y un 1/0 DSN sin neutral, viajarán a través de 3 tuberías de 4", el sistema en diseño es similar al de la estación de bombeo #1, variando en que tiene sólo dos ramas con bombas con los mismos componente en sus dos ramas, en la tercera rama de este lado, se encuentra el panel principal, el cual es 3P de 42 circuitos, 120/208V y 200A acompañado del interruptor principal por supuesto de similar capacidad, 200A; además hay un transformador de 30 kVA, 480/120:208 V, 3 P, que acopla el interruptor y el panel a la instalación.
Notas de electricidad
1. Toda la instalación eléctrica estará conforme a los reglamentos vigentes en la República de Panamá y el NEC última edición.
2. El calibre mínimo de alambre será No. 12 AWG excepto para teléfonos y control.
3. Todos los alambres no indicados serán No. 12 THHN.
4. Las tuberías serán de PVC y llevarán un conductor de tierra de equipo desnudo de acuerdo con la tabla 250-95 del NEC de 1999.
5. Todas las cajillas serán de metal galvanizado y pintadas contra óxido.
6. Todos los tableros tendrán barras de neutral aislado y barra de tierra.
7. Sólo se permitirá unir el neutral con tierra en la entrada eléctrica.
8. Las conexiones a los motores y equipos que vibren se harán con tuberías metálicas flexibles tipo "GREENFIELD" cuando esté expuesta a la intemperie, se usará tubería con cubierta plástica tipo "LIQUIDTITE".
9. No se permitirá alterar o modificar el plano eléctrico, sin permiso del ingeniero eléctrico diseñador responsable.
10. Todos los gabinetes de tableros, interruptores breackers, etc., expuestos a la intemperie serán del tipo NEMA 3R.
11. Todos los tomacorrientes deben ser instalados a 0.30m desde el nivel de piso acabado, a menos que se indique altura en el plano.
Arrancadores de estado sólido
En un principio los arrancadores de estado sólido se concibieron a los efectos de limitar la corriente durante el arranque de motores eléctricos. Frente a otras soluciones como ser autotransformadores y arranques estrella-triángulo, los arrancadores de estado sólido se están imponiendo. Los precios relativos tienden a equipararse y las prestaciones de los últimos aumentan constantemente. Una vez solucionado el arranque, surge la necesidad de ocuparse del frenado. En particular en algunas aplicaciones este aspecto es crítico. Por ejemplo durante el proceso de frenado de las bombas hay que prestar atención a la no ocurrencia del efecto de ariete. Aquí es dónde empieza el problema. ¿Por que no utilizar el propio arrancador de estado sólido para detener los motores de las bombas lentamente? Es claro que lo pueden hacer. Basta haber diseñado en forma adecuada los SCR y los disipadores del arrancador. Una rampa de frenado de 4 minutos sería razonable si no fuese que los problemas de compatibilidad Electromagnética (EMC) que tendremos no serán triviales. La producción de armónicos durante una rampa de frenado con arrancador de estado sólido es considerable. La mayoría de los casos en que se usa un arrancador, la rampa de arranque es de tiempo del orden de los segundos. El problema de armónicos, si bien existe, puede ser asimilado o no causaría tantos problemas. Un comentario al margen es que si bien podría decirse que lo adecuado en estos casos es utilizar un variador de frecuencia, la diferencia de costos de inversión entre un arrancador y estos es todavía una fuerte razón para preferir los arrancadores. Por otra parte si lo único que se desea es arrancar y detener el motor en forma controlada, un variador de frecuencia es una solución desmedida (dado el precio comparativo actual).
El problema con los armónicos emitidos durante las rampas podría no ser un problema mayor si no fuese por las resonancias que generalmente se producen. Estas resonancias se producen entre los siempre presentes condensadores de compensación de reactiva y la impedancia de cortocircuito en el punto de conexión del arrancador.
Muchos fabricantes de arrancadores de estado sólido especifican que hay que desconectar los condensadores durante las rampas. Parece ser una sana práctica en la medida que no se termine teniendo un problema de falta de compensación de reactiva. Este último aspecto es crítico si las rampas son relativamente largas respecto al ciclo de funcionamiento de las bombas de la planta.
LAS RAMPAS DE ARRANQUE Y PARADA DE UN MOTOR DE UNA BOMBA
En la mayoría de los casos reales el tiempo de rampa es despreciable frente al ciclo de trabajo del sistema y puede despreciarse la reactiva consumida durante las mismas. Sin embargo en los casos en que los tiempos de rampa son relativamente largos hay que tener en cuenta dicho consumo.
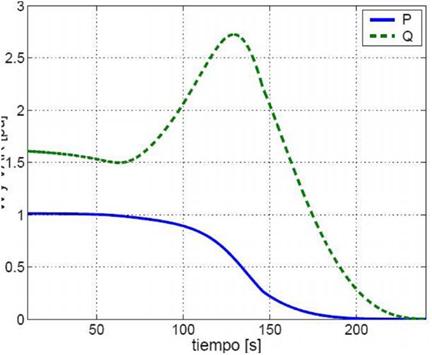
FIGURA17- Grafica consumo activa y reactiva en arranque.
MEDIDAS DURANTE UNA SEMANA
A. Tensiones y desbalances:
Las tensiones medias, mínimas y máximas resultan en el peor caso apartadas un 4
% del valor nominal de 480V.
El desbalance de tensión promedio medido resultó ser de 0.38 % con 0.6 % de valor máximo y 0.13 % de valor mínimo.
Estos valores están por debajo del 2% establecido cómo máximo en las recomendaciones internacionales.
B. Armónicos de tensión:
La máxima medida fue de 2.6 % que es menor que el 8 %
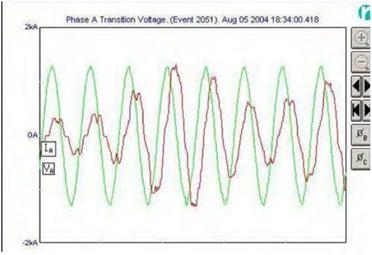
FIGURA 18- Ejemplo de armónicos de tensión.
Por otra parte, durante el arranque de cada bomba se consumen corrientes transitorias del orden de 840A (valor compatible con las rampas de arranques de 10 segundos programadas en los equipos). Este nivel de sobre corriente de arranque es menor de lo que los equipos soportan en forma normal. Como ya se ha indicado el equipo es capaz de soportar arranques de hasta 1120A (In x 4) durante 6 segundos. En régimen y luego de los arranques, las corrientes medidas estuvieron de acuerdo con la especificación (In) de los equipos.
En suma, desde el punto de vista de la corriente consumida, el equipo estaba siendo bien utilizado y dentro de sus especificaciones.
Catálogo técnico
CONVERTIDORES DE FRECUENCIA ESTÁNDAR ABB, ACS550
CARACTERÍSTICAS GENERALES
APLICACIÓN EN LA INDUSTRIA:
Los convertidores de frecuencia estándar ABB, ACS550 pueden emplearse en un amplio conjunto de industrias. Se usan frecuentemente en bombas, ventiladores y en aplicaciones de par constante, como por ejemplo las cintas transportadoras. Los convertidores ABB estándar resultan perfectos si se desea sencillez en la instalación, la puesta en marcha y el manejo, siendo igualmente apropiados en aquellos casos en los que no se requiera tecnología personalizada o específica para productos especiales.
CARACTERÍSTICAS GENERALES DE UTILIZACIÓN
?? FlashDrop
?? Panel de control asistente para un uso intuitivo
?? Reactancia de autoinductancia variable para la reducción de los armónicos superiores
?? Control vectorial
?? Tarjetas barnizadas para entornos difíciles
?? Filtro EMC integral de categoría C2 (1er entorno) como estándar
?? Sistema de bus de campo flexible con Modbus integrado y numerosos adaptadores de bus de campo que se pueden montar internamente. CE, UL, cUL, CSA, C-Tick y GOST R aprobados Cumple la RoHS *)
DIMENSIONES
Existen dos presentaciones de montaje para los convertidores de frecuencia.
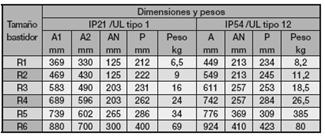
FIGURA 19- Tabla con dimensiones y pesos de los Arrancadores de Estado Sólido.

FIGURA 20- Arrancadores de Estado Sólido.
COMPATIBILIDAD ELECTROMAGNÉTICA
La norma de producto EMC [EN 61800-3 + Enmienda A11 (2000)] cubre los requisitos EMC específicos para los convertidores de frecuencia (comprobados con motor y cable) dentro de la UE. La nueva revisión de la norma de producto 61800-3 (2004) debe aplicarse antes del 1 de octubre de 2007, como máximo. Las normas EMC como EN 55011 o EN 61000-6-3/4, se aplican a equipos y sistemas industriales y domésticos, incluyendo los componentes internos del convertidor. Los convertidores de frecuencia que cumplen los requisitos de la norma EN 61800-3 también cumplen las categorías equivalentes de EN 55011 y EN 61000-6- 3/4, aunque no siempre sucede al contrario. EN 55011 y EN 61000-6-3/4 no especifi can la longitud del cable ni requieren que exista un motor conectado como carga. Los límites de emisión pueden compararse de conformidad con la tabla de normas EMC
ESPECIFICACIONES TÉCNICAS DE CONSTRUCCIÓN
Conexión a la red
| Rango de potencia y tensión | Trifásica, 380 a 480 V, +10/-15%, 0,75 a 355 KW Trifásica, 208 a 240 V, +10/-15%, 0,75 a 75 KW Autoidentificación de la línea de entrada. | ||
| Frecuencia | de 48 a 63 Hz | ||
| Factor de potencia | 0,98 | ||
Conexión del motor
| Tensión | Trifásica, de 0 a UALIMENTACIÓN | |
| Frecuencia | de 0 a 500 Hz | |
| Capacidad de carga continua | Intensidad de salida nominal I2N | |
| Capacidad de continua | En uso normal: 1,1 x I2N durante 1 minuto cada 10 minutos. En uso en trabajo pesado: 1,5 x I2hd durante 1 minuto cada 10 minutos Independientemente del uso: 1,8 x I2hd durante 2 segundos cada 60 segundos | |
| Frecuencia de conmutación | De fábrica, 4 kHz 1 kHz, 4 kHz, 8 kHz, 12 kHz 1 kHz, 4 kHz, 8 kHz 1 kHz, 4 kHz | |
| Tiempo de aceleración | de 0,1 a 1.800 s. | |
FIGURA 21- Tabla con especificaciones técnicas de los Arrancadores de Estado Sólido.
CARACTERÍSTICAS TÉCNICAS DE TENSIÓN.
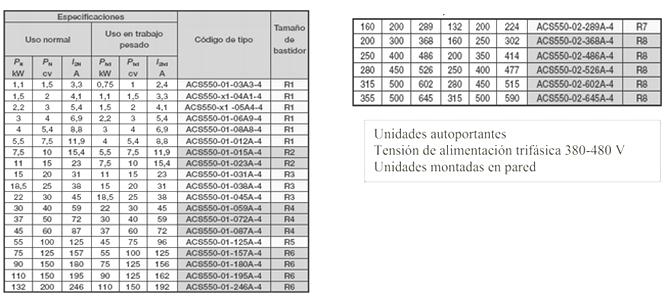
FIGURA 22- Tabla con características técnicas de tensión de de los Arrancadores de Estado
Sólido.
DATA DE CONEXIONES DE CONTROL
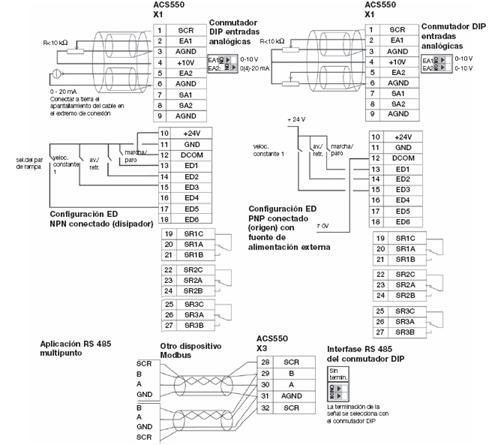
FIGURA 23- Conexiones de Control de los Arrancadores de Estado Sólido.
COMPATIBILIDAD ELECTROMAGNÉTICA
La norma de producto EMC [EN 61800-3 + Enmienda A11 (2000)] cubre los requisitos EMC específicos para los convertidores de frecuencia (comprobados con motor y cable) dentro de la UE. La nueva revisión de la norma de producto 61800-3 (2004) debe aplicarse antes del 1 de octubre de 2007, como máximo. Las normas EMC como EN 55011 o EN 61000-6-3/4, se aplican a equipos y sistemas industriales y domésticos, incluyendo los componentes internos del convertidor.
DATA DE CONEXIONES A TERMINALES DEL DRIVER
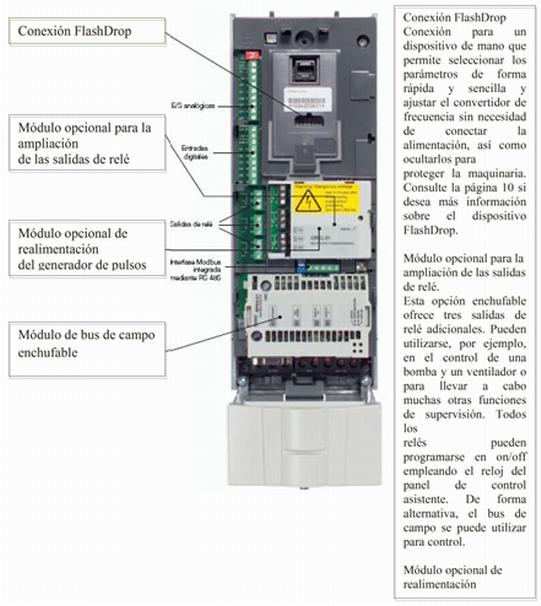
FIGURA 24- Data de conexiones a terminal de los Arrancadores de Estado Sólido.
PANEL DE CONTROL
El panel de control asistente, que se suministra de serie, incluye una pantalla alfanumérica multilingüe (EN, DA, DE, ES, FI, FR, IT, NL, PT, SE, US) o con código J416 (EN, DE, CZ, HU, PT, RU, TR) para facilitar la programación del convertidor. Además, el panel de control incluye varios asistentes y una función de ayuda integrada para facilitar la labor al usuario, así como un reloj de tiempo real que puede emplearse, p. ej., para señalar el comienzo y la finalización de procesos tales como el registro de fallos y el control del convertidor. El panel de control puede utilizarse asimismo para realizar copias de seguridad de los parámetros o para descargarlos en otros convertidores. Su uso resulta extremadamente sencillo gracias a la pantalla gráfica de gran tamaño y a las teclas multifunción.
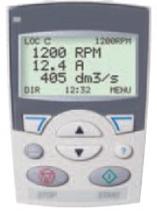
FIGURA 25- Panel de control asistente.
Motor vertical Siemens y módulos de protección de estado sólido para motores
MOTOR TRIFÁSICO JAULA DE ARDILLA, VERTICAL, FLECHA HUECA CON TECHO SIN PATAS TIPO 1PM (HSRGZVESD)

FIGURA 26- Motor trifásico jaula de ardilla, vertical, flecha hueca con techo sin patas tipo 1PM (HSRGZVESD), marca Siemens.
DESCRIPCIÓN DEL MOTOR
Este tipo de motores esta destinado a impulsar bombas que imponen altas cargas de empuje axial descendente, como bombas de pozo profundo.
Los motores verticales flecha hueca se pueden utilizar en interior o intemperie, ya que por su diseño totalmente cerrado TCVE, los bobinados, baleros, estator y rotor están libres de contaminación por polvo, humedad, basura y ataque de roedores, lo que garantiza un funcionamiento confiable y duradero.
Los motores están provistos con brida tipo "P" para montaje al cabezal de la bomba. La caja de conexiones tiene espacio suficiente para realizar las conexiones de cables de una manera fácil y segura, ya que se cumple el volumen prescrito en la norma NEMA MG-1-
1987.
Aspecto eléctrico: Motor diseño NEMA "B". El rotor es del tipo jaula de ardilla inyectado con aluminio de alta calidad. La tensión nominal de operación es de 440 Volts a 60
Hz.
PROTECCIÓN
Nuestro motor vertical flecha hueca posee un trinquete, mediante el cual se evita un giro opuesto al normal del motor que pueda ocurrir por una conexión eléctrica equivocada o porque el agua que quedo en la columna de la bomba al pararse el motor, tienda a recuperar su nivel normal y esto pueda ocasionar que la flecha de la bomba se destornille.
El trinquete elimina esta posibilidad, al caer uno de los siete pernos alojados en el ventilador de algún canal de la tapa balero exterior y así detener inmediatamente el motor y evitar el peligroso sentido opuesto de giro.
Solamente personal especializado deberá realizar la instalación y acoplamiento de la bomba y motor flecha hueca.
RODAMIENTOS
El sistema de rodamiento lo componen uno o dos baleros de contacto angular montados en el escudo (soporte de carga) y un balero guía montado en la brida. Lo anterior permite una operación suave y silenciosa.
" PROTECCIÓN TÉRMICA EN RODAMIENTO DE CARGA
El motor esta provisto de fábrica con una protección térmica "PR" en los rodamientos de carga, el objeto de esta protección adicional en toda serie de motores es detectar cualquier anomalía durante el funcionamiento.
MANTENIMIENTO
Esta reducido a un mínimo de trabajos y costos. Para ello basta seguir las indicaciones dadas en las placas de características y lubricación del motor, sobre todo lo referente al tipo de grasa y el periodo de reengrase.
LISTA DE PARTES DEL MOTOR VERTICAL FLECHA HUECA
Despiece, Montaje
1. Cubierta superior. (Techo)
2. Rejilla.
3. Cople 3)
4. Ventilador
5. Capuchón.
6. Cuna Ventilador.
7. Salpicador roscado para ajuste de baleros.
8. Tornillo Allen.
9. Rodamiento de contacto angular 1) (Doble)
10. Escudo opuesto.
11. Tornillo C. Hexagonal.
12. Tapa balero interior lado opuesto.
13. Sellos para grasa.
14. Flecha hueca.
15. Carcasa.
16. Anillo de fieltro.
17. Tapa balero interior.
18. Muelle de precarga.
19. Tornillo C. Hexagonal.
20. Rodamiento de bolas.
21. Salpicador.
22. Brida "P".
23. Tornillo C. Hexagonal.
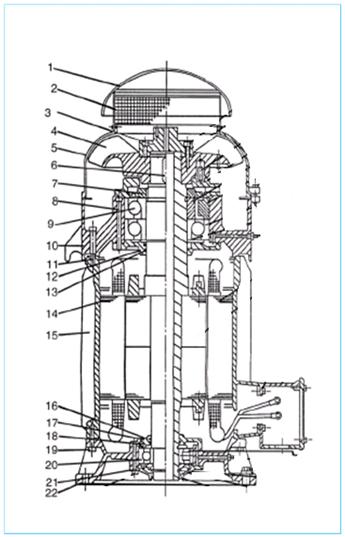
Figura 27- figura del Motor Vertical flecha hueca.
24. Tornillo Allen.
25. Anillo de seguridad.
26. Perno trinquete.
27. Tapa balero exterior lado opuesto.
28. Anillo separador 2) .
29. Pieza de relleno 2) .
30. Tornillo C. Hexagonal.
31. Rodamiento de contacto angular 2) (Simple)
32. Anillo de seguridad.
33. Grasera.
34. Paquete estator.
35. Paquete rotor.
36. Tornillo C. Hexagonal.
37. Caja de conexiones.|
38. Rodamiento guía (rodillos).
39. Grasera.
40. Anillo de seguridad.
41. Tapa balero exterior lado brida.
42. Reten (V-Ring).
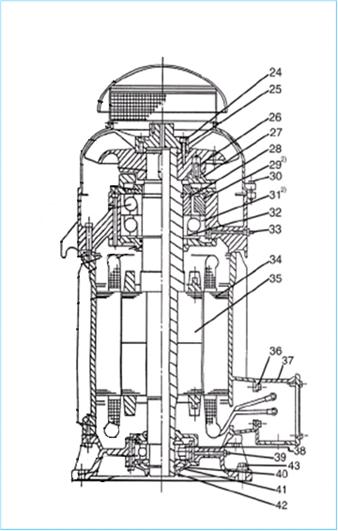
Figura 28- figura del Motor Vertical flecha hueca.
43. Placa de apriete para la apuesta de tierra.
CARACTERISTICAS ADICIONALES DEL MOTOR

Figura 29- Catálogo de Motor Siemens con especificaciones del motor escogido.
CARACTERISTICAS ADICIONALES DEL MOTOR
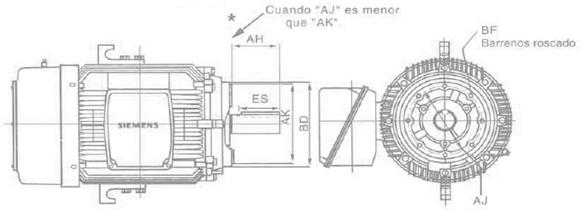
Figura 30- Catálogo de Motor Siemens con especificaciones del motor escogido.
Dispositivos de protección de estado sólido para motores
El uso de componentes electrónicos, sean discretos o módulos de estado sólido integrados (ASICs o microprocesadores), en la construcción de relevadores de sobrecarga a resultado en una mejora en protección, mejores funciones, y comunicaciones ofrecidas por estos productos.
Estas aplicaciones no están disponibles con típicas aleaciones y bimetales de los relays de sobrecarga electromagnéticos. Ya que muchos relays de sobrecarga de estado sólido proveen mucho más que la protección de sobrecarga básica, es adecuado referirse a estos módulos como "módulos de protección de estado sólido para motores".
Superior protección, mejora de funciones y comunicación son amplias categorías de beneficios provistos por los módulos de protección de estado sólido para motores.
Las mejoras en la protección incluyen:
?? Protección en las pérdidas de fase
?? Desbalance de fase
?? Secuencia de fase
?? Protección de sobrecarga
?? Fallo a tierra
Mejoras de funciones debido a la electrónica:
?? Incremento en la precisión y repetibilidad
?? Menor generación de calor y uso de energía
?? Mayor rango de variación en la corriente
?? Funciones de control
Finalmente los módulos de protección de estado sólido para motores poseen capacidades de comunicación que permiten al usuario controlar y monitorear el proceso de los elementos para así maximizar la productividad y optimizar los procesos de manufacturación.
Los módulos de protección de estado sólido para motores tienen esta protección las cuales pueden ser parte integrada de un arrancado de motor, como también módulos "solos" que son instalados separados en un panel de control o en una carcasa cerradas, pero usado en conjunto con un contactor.
Describiremos aplicaciones típicas donde los beneficios de los módulos de protección de estado sólido para motores pueden ser realizados.
IMPORTANCIA DE LA PROTECCIÓN DEL MOTOR
Es importante reconocer porque los motes deben ser protegidos. La protección apropiada de los motores es requerida para:
?? Minimizar daños para el motor y los equipos asociados
?? Maximizar la productividad
?? Incrementar la seguridad del personal en el área de los motores.
Todas estas áreas son afectadas no solo por el motor mismo y la aplicación, sino también por el ambiente donde el motor es instalado.
Los motores eléctricos son un componente crítico en muchas aplicaciones. Los motores fallan por un número de razones, incluyendo:
?? Calor excesivo, humedad y contaminación
?? Cortocircuito
?? Problemas mecánicos
?? Envejecimiento
CONSTRUCCIÓN DE LOS DISPOSITIVOS DE PROTECCIÓN DE ESTADO SÓLIDO PARA MOTORES VS. LOS RELAYS DE SOBRECARGA ELECTROMAGNÉTICOS
Existen diferencias significativas en la construcción y desempeño de los relevadores de sobrecarga electromecánicos y los módulos de protección de estado sólido para motores los cuales deben conocerse para identificar los beneficios que pueden ofrecer.
Estas diferencias incluyen los principios de operación de los 2 tipos de módulos, la reducción en la disipación de calor, y el ahorro de energía que puede ser realizado por los módulos de protección de estado sólido para motores.
Los relays de sobrecarga electromecánicos tradicionales (de aleación eutética o bimetalitos) no miden la corriente directamente. Estos módulos operan haciendo pasar la
corriente a través de un elemento calentable, que simula el efecto del calor que toma lugar en el motor. Durante las condiciones de sobrecarga, el calor generado en el elemento calentable alcanza un nivel en el cual un mecanismo opera un contactor auxiliar el cual se abre.
En aplicaciones típicas el embobinado del contactor es enrollado en series con este contacto. Cuando el contactor auxiliar abre, el contactor es des- energizado, removiendo la corriente del motor.
Los módulos de protección de estado sólido para motores por otro lado, si miden la corriente directamente. La corriente puede ser medida en varias maneras, pero el método más típico de medir la corriente es usando transformadores de corriente. Cuando una condición de sobrecarga es alcanzada, el circuito electrónico del módulo debido al incremento en la corriente, causa que un contacto se bahía (similar al de los relays de sobrecarga electromecánicos) des-energizando el contactor y removiendo la corriente del motor.
FUNCIONES DE PROTECCIÓN
Los módulos de protección de estado sólido para motores no solo proveen la protección tradicional contra las corrientes de sobrecarga a las cuales el motor está sujeto, sino que también proveen más información y protección contra otras condiciones de falla.
Mejoras en la protección por la electrónica incluyen:
?? Pérdida de fase
?? Imbalance de fase
?? Protección de sobrecarga
?? Falla a tierra
?? Protección contra underload
?? Protección contra sobre-temperatura
Este aumento en la protección e incremento en la funcionabilidad permite a los compradores proteger a los motores con más efectividad y precisión en aplicaciones críticas y especiales. Adicionalmente, la data recolectada por el módulo de protección de estado sólido para motores puede ser utilizada para mejorar el desempeño del proceso.
Los módulos de protección de estado sólido para motores pueden monitorear la corriente de fase la cual es utilizada para proveer la protección de desbalance de fase y pérdida de fase.
En conclusión, todas las funciones de protección antes mencionadas son funciones que antecedentemente estaban disponibles por otras clases de paneles de control usados con los relevadores de sobrecarga electromecánicos o utilizando componentes redundantes. El uso de electrónica en los módulos de protección de estado sólido para motores elimina la necesidad de muchos paneles de control extras y componentes.
La eliminación de estos componentes y paneles incrementa la confiabilidad del sistema porque hay menos componentes en el sistema que pueden fallar. Adicionalmente, los costos de instalación pueden ser reducidos porque hay mucho menos puntos que cablear, menos componentes que instalar en el panel de control, y los paneles pueden volverse físicamente más pequeños porque las funciones de protección están incorporadas en otro módulo, de esta forma, liberando valioso espacio en los paneles y espacio en las máquinas requeridas para soportar los paneles de control.
COMUNICACIÓN
Un arrancador o módulo de protección de un motor con la habilidad de comunicar información de vuelta a un procesador principal o control provee de un completo expectro de nuevas oportunidades para optimizar procesos y maximizar la productividad.
El grado en el cual la productividad puede ser maximizado y los procesos pueden ser optimizados es basado en los parámetros o condiciones de procesos que pueden ser comunicados desde el arrancador al control principal, el cual puede ser un PLC (controlador lógico programable) o una computadora personal (PC). Los módulos de protección de estado sólido para motores típicamente proveen un medidor o display para comunicar en tiempo real los parámetros de la aplicación, y también almacenar información estadística para proveer un historial de data de acuerdo a la aplicación.
Mientras que la comunicación vía network-bus a un PLC o computadora personal es la forma más común de comunicación, otros medios de comunicación también están disponibles. Esto incluye el display de la data en una pantalla LCD en el mismo módulo de protección del motor, LCD o LED display en un modulo de interfase que puede ser montado en una puerta carcasa; o la comunicación puede ocurrir con LEDs parpadeantes en el módulo de protección del motor.
Bomba de mucosidad axial Siemens
Especificaciones:
?? Capacidad para: 1250 GPM (284 m3/h)
?? Altura 430 pies (131 m)
?? Presión: 375 PSIG (2586
KPa)
Bomba diseñada para una larga vida de trabajo. Las chumaceras de soporte tienen una duración mínima de 50.000 horas de operación. Los bujes, anillos de desgaste, impulsor, se pueden cambiar fácilmente en el sitio de trabajo.
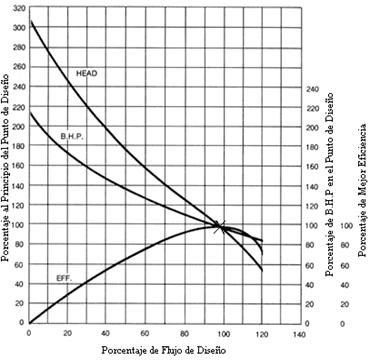
FIGURA 31- Curva Característica de la Bomba
Impulsores: Los ejes son fabricados en acero inoxidable A.I.S.I. 304, 316 y 1045 con casquillos de desgaste de acero inoxidable revestidos de cerámica de alta dureza y los impulsores son fabricados en acero inoxidable.
Lubricación: Las bombas son lubricadas por agua que utilizan bujes de caucho-bronce y ejes de acero inoxidable 304.

FIGURA 32- Vista de Impeler de Flujo Axial
Accesorios
?? Botones Pulsadores
?? Fusible de Acción Rápida
?? Cableado de Potencia
?? Interruptores Termomagnéticos
?? Relevadores de Sobrecarga o Magnéticos
?? Tableros de Control
BOTONES PULSADORES


FIGURA 33- Ejemplos de un botones pulsadores
Características:
?? Color rojo y verde
?? 3SA11 01 rojo
?? 3SA11 04 verde
DATOS TÉCNICOS TENSIÓN NOMINAL DE AISLAMIENTO
| Corriente Alterna | Corriente Continua | Corriente Permanente |
| 500V | 600V | 10A |
VIDA ÚTIL DE LOS CONTACTOS
?? Corriente de desconexión con C.A. 1 2 4 5 10 A
?? Vida útil mecánica aprox. 10 millones de maniobras
?? Temperatura ambiente máx. Admisible de -20°C hasta +55°C
?? Sección de conexión (conductor) AWG No. 14
?? Botón pulsador para contacto momentáneo
?? Elemento de conexión 3SA10 10
?? Pulsadores de control 3SA1
Fusible de acción rápida

FIGURA 34- Cartuchos fusibles SITOR, 3NE4 para protección de semiconductores.
Cartuchos fusibles SITOR, 3NE4 para protección de semiconductores
?? Según las normas: DIN VDE 0636 e IEC 60 269.
?? Dimensiones según DIN 43 620 y DIN 43 653.
?? Tensiones asignadas: 690 / 1500 V CA.
?? Clase de servicio: gR y aR para protección de semiconductores. Corriente nominal 315A fusión 7400
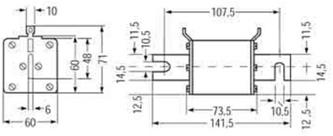
FIGURA 35- Tamaño y medidas técnicas del fusible de acción rápida.
CABLEADO DE POTENCIA
FIGURA 36- Cableado de potencia
?? AWG 4/0 manejar el tipo de corriente y voltajes p-p
INTERRUPTORES TERMOMAGNETICOS
3 polos corriente nominal 300 A
Rango mínimo 250 A rango máximo 500 A voltaje de 240 – 500 v
FIGURA 37- Interruptores Termomagnéticos.
RELEVADORES DE SOBRECARGA O MAGNETICOS
?? Relevador de Protección de Estado Sólido
?? Relevador Industrial SPDT
RELEVADOR DE PROTECCIÓN DE ESTADO SÓLIDO

FIGURA 38- Relevador de Protección de estado de sólido.
?? Voltaje de 240 – 300 v alcance de regulación de 200-540 A
RELEVADOR INDUSTRIAL SPDT

FIGURA 39- Tamaño y medidas técnicas del fusible de acción rápida.
?? 7 pines bobina de 280 v -220 corriente en contactos de 15 A.
Tableros de control
?? Tablero IP Principal
?? Tablero de Control de Motores
TABLERO IP PRINCIPAL

FIGURA 40- Tablero IP Principal.
Debido a que los tableros de distribución tipo FCI, FCII y FCIII cuentan con secciones para interruptor general. Zapatas generales y celdas de acoplamiento pueden ser utilizados como tableros principales integrales en plantas industriales, grandes complejos, grandes y medianas industrias. El diseño permite abrigar en su interior interruptor electromagnéticos como principales y un gran número de interruptores termo magnéticos como derivados por lo que es ideal para la protección de líneas contra los efectos de corto circuito y sobre carga
?? Tensión de operación máxima: 600 Vc.a., 250Vc.c., 3F, 4H
?? Barras principales: Cobre
?? Corriente en barras principales: 1200, 1600, 2000, 3200 y 4000 A
?? Frecuencia: 60 Hz.
?? Tipo de interruptores principales: ND
Hola Juan Gerardo,
Actualmente no disponemos de cursos especializados relacionados con tu interés, pero puedes ver la oferta formativa de nuestro portal en el siguiente enlace:
* Oferta formativa Plusformación
Un saludo!